
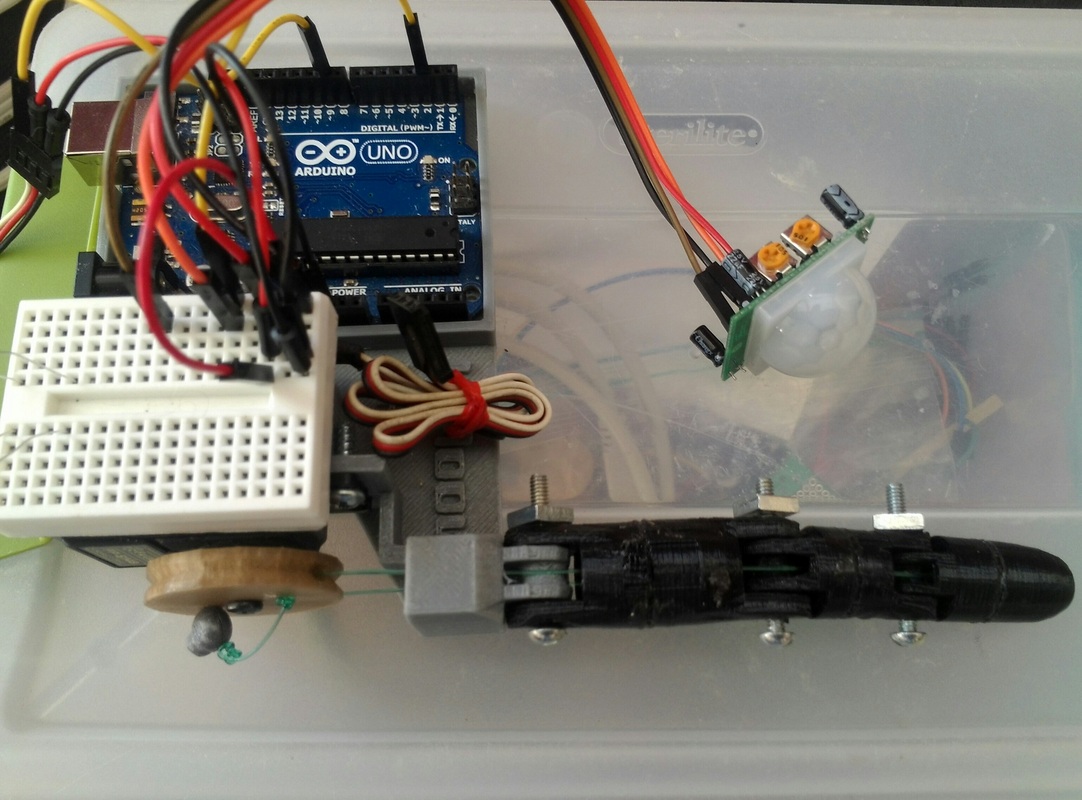
I came across the InMoov project while I was browsing Thingaverse for something to 3D print and knew immediately I would have to accept the challenge of building the hand. If you have never heard of InMoov you can check it out Here on the InMoov Home Page. To get started, I decided to try the finger starter. I figured if I could get the index finger to work then the hand should be doable. I had the parts for the index finger and the finger sarter base printed and I set up an Arduino Uno with a servo. I was able to thread fishing line through the finger and attach to the servo. With a simple sketch uploaded to the Arduino, I had the index finger working with three types of control.

With the index finger a succes, it was time to move forward with the hand. Since I have no 3D printer, I had to use a combination of 3Dhubs.com and the local library MakerSpace to get the parts printed. I've found 3Dhubs to be a great resource for affordable printing services, with hubs in my local area and more than 10,000 hubs globally to choose from. However, I had the parts for the right hand printed for 5 cents a gram at the MakerSpace in my local library. Keeping the parts organized is key here.

After hours of careful sanding and drilling, I had all the parts fitting together nicely and moving freely. A little epoxy and 100lb fishing line and the hand was taking shape. I don't have the forearm and servo bed printed yet, but can't wait to start animating the hand.
